OPC-UA
RoboDK OPC UA服务器还提供了一些方法,允许用户动态地访问RoboDK站的数据。
我们可以点击右键>调用执行方法的方法。

getItem是一种方法,允许用户获取项的指针。
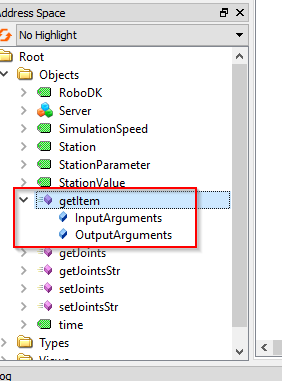
InputArguments,设备名称是必需的,你可以图像设备名称是你站的名字,机器人的名字…等…和项ID是OutputArguments返回的指针装置。

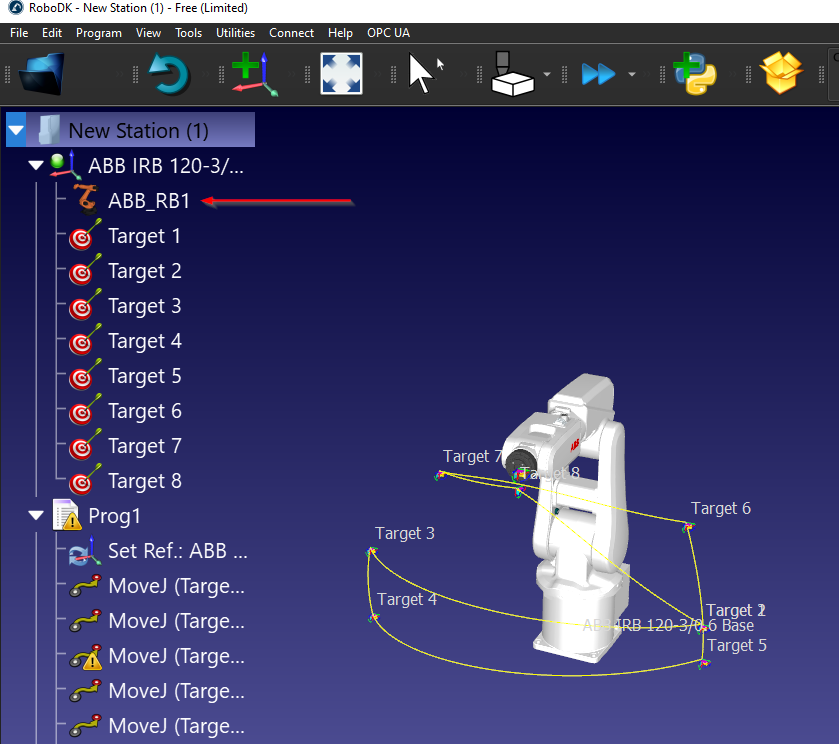
在这个例子中,我收到我的项目ID(指针)ABB机器人,被命名为“ABB_RB1”。
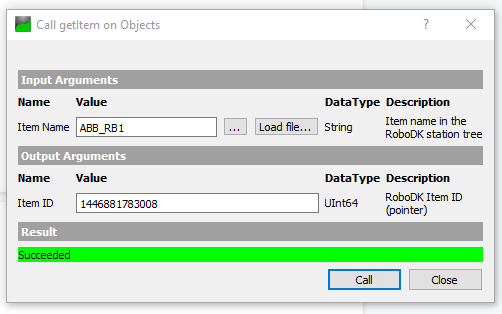
返回0,如果物品的名称是无效的或不存在在你的站。

getJonits是一个方法,允许用户从车站得到机器人的共同价值,基于项ID。

项ID的指针值你的项目,你可以把它从getItem()方法。

我们将这种“ABB_RB1”项的项ID名称,并返回UInt64值。
关节返回值传递项ID在我们在前面的方法。

getJointsStr是一个方法,允许用户获取关节值基于一个字符串值。
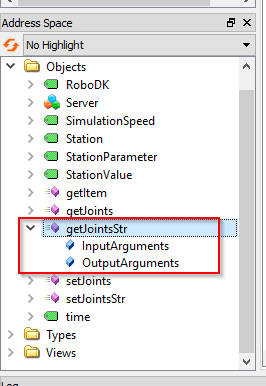
我们可以通过机器人的名称(字符串)这种方法。

我在车站,ABB_RB1机器人是我的名字。
我们可以通过“ABB_RB1”机器人名称参数,调用该方法,则返回字符串格式的共同价值。

setJointsStr是一个方法,允许用户设置机器人的关节值,基于一个字符串值。

在机器人的名字,ABB_RB1是过去了,我们可以通过一个字符串与关节参数的共同价值。
例如:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000
